1. Technischer Hintergrund und Anwendungsbereich
BMW Motorrad setzt bei den Modellen der Baureihe BMW R1200GS (LC) bis Baujahr 2015 ein Motorsteuergerät (ECU) vom Typ Bosch BMSX ein. Die Speicherarchitektur dieser Hardware-Plattform gliedert sich wie folgt:
Flash-Speicher (4.096 KB): Beinhaltet das primäre Betriebssystem der ECU sowie die Applikationsdaten (Kennfelder).
EEPROM (96 KB): Enthält fahrzeugspezifische Datensätze, darunter Freischaltcodes (FSC), KM-Stände sowie die elektronische Wegfahrsperre (EWS).
Wirtschaftliche Relevanz
Im Zuge von Fahrzeug-Retrofits (Nachrüstungen) oder bei einem irreparablen Hardware-Defekt bietet das Klonen bzw. die Modifikation eines gebrauchten Austauschsteuergerätes eine hochgradig kosteneffiziente Alternative zum zeitwertuntypischen Neukauf über das herstellerseitige Servicenetzwerk.
Dank moderner Protokolle ist es heute möglich, diese Datenbestände im sogenannten Bench-Modus vollständig auszulesen und zu beschreiben, ohne das Gehäuse der ECU physisch zu öffnen. Dies eliminiert das Risiko von Dichtigkeitsproblemen oder mechanischen Beschädigungen der Platine.
2. Systemanforderungen und Hardware-Setup
Für die Durchführung des Prozesses ist folgende Infrastruktur zwingend erforderlich:
-
Host-System: Standard-PC mit dedizierter USB-A-Schnittstelle.
-
Software-Umgebung:
PCMFlash(empfohlene Version: 1.2.0) inklusive USB-Lizenz-Dongle. Bei Amazon im Bundle -
Hardware-Interface: J2534-PassThru-Interface (z. B.
Scanmatik SM2 Pro). Bei Amazon im Bundle
Sicherheits- und IT-Infrastrukturhinweis
Wichtig: Aufgrund der proprietären Signatur- und Zugriffsroutinen stufen gängige Antiviren-Scanner die Flash-Software temporär als Sicherheitsrisiko ein. Es wird dringend empfohlen, für diesen Prozess ein dediziertes, isoliertes System (Offline-Notebook oder neu aufgesetztes Windows OS) ohne Zugriff auf das Firmennetzwerk zu verwenden, um potenzielle IT-Sicherheitsrisiken zu minimieren.
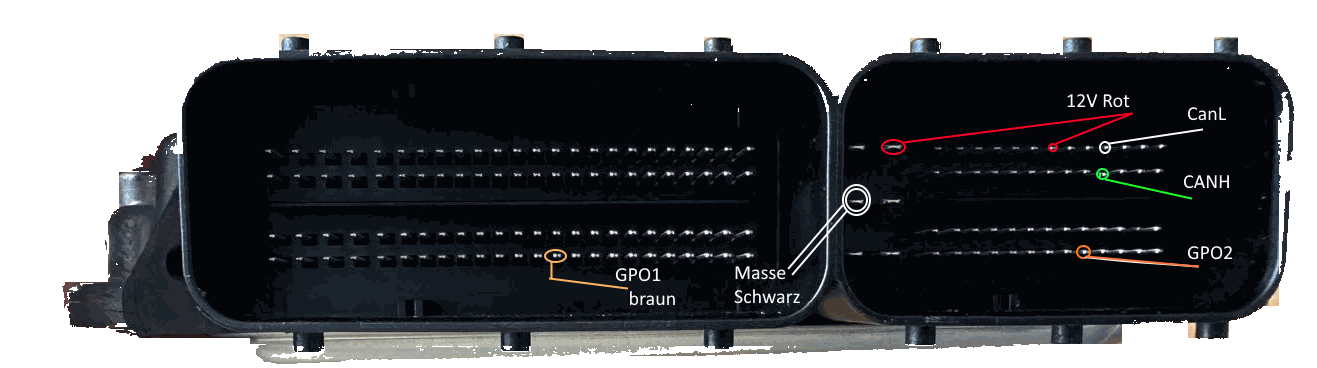
3. Anschlussbelegung (Pinout-Konfiguration)
Das Herstellen der physischen Verbindung erfordert absolute Präzision. Eine Fehlbelegung der Pins kann zur thermischen oder elektrischen Zerstörung der ECU führen. Die Spannungsversorgung (12V) bleibt während der gesamten Verkabelung getrennt.
Befolgen Sie die Pin-Belegung des J2534-Kabelbaums am BMSX-Stecker wie folgt (Orientierung gemäß technischer Dokumentation):
-
Masse (GND): Entsprechend der schematischen Darstellung am Gehäuse/Stecker kontaktieren.
-
Dauerplus (+12V / Batt): Rote Kabelverbindungen an die dafür vorgesehenen Versorgungspins anlegen.
-
CAN-High (Zentraler Datenbus): Grünes Kabel auf Reihe 2, Pin 4 (von rechts gezählt).
-
CAN-Low (Zentraler Datenbus): Weißes Kabel auf Reihe 1, Pin 4 (von rechts gezählt).
-
Steuerleitung GPO1: Braunes Kabel auf der unteren Reihe, Pin 11 (von rechts gezählt).
-
Steuerleitung GPO2: Verbindung auf der letzten Reihe, Pin 5 (von rechts gezählt).
4. Software-Konfiguration und Prozessablauf
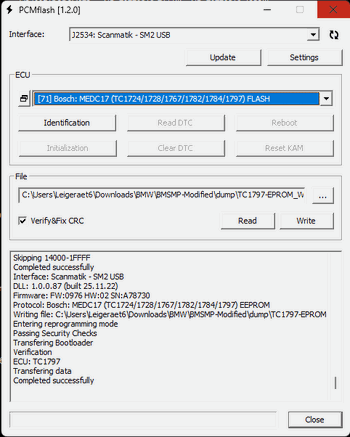
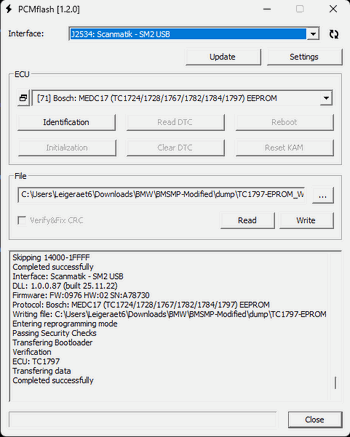
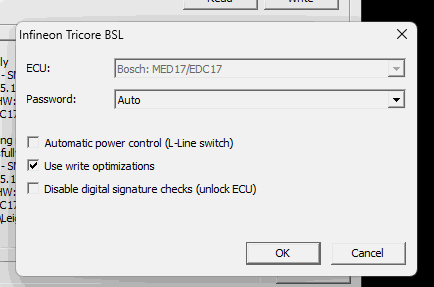
4.1 Datentyp-Auswahl
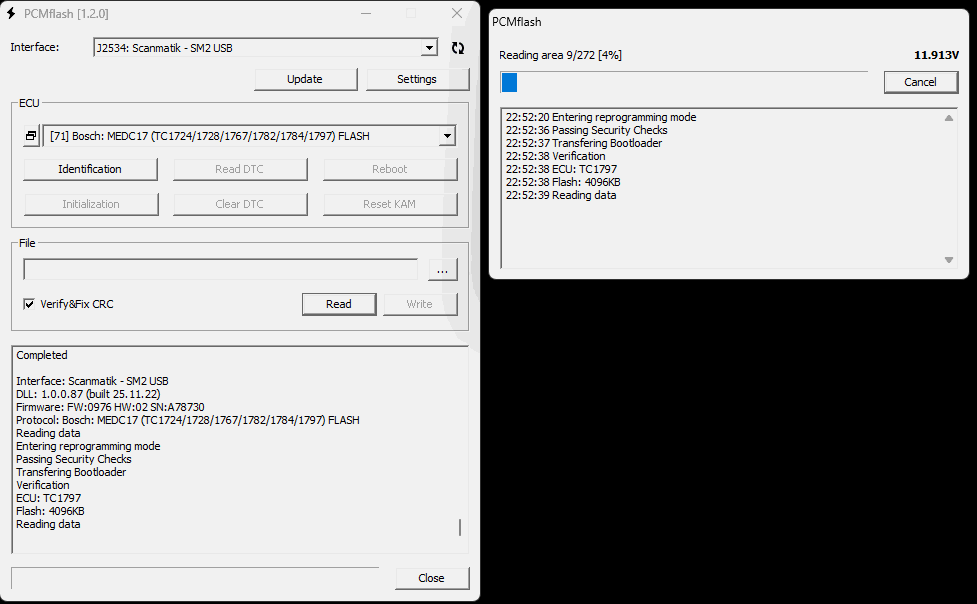
Da Flash und EEPROM separate Speichersegmente darstellen, müssen die Lese- und Schreibvorgänge zwingend nacheinander durchgeführt werden. Wählen Sie in PCMFlash das korrekte Steuergeräte-Profil:
-
Protokoll-Auswahl: Typischerweise Modul 71 (Infrastruktur für Bosch-Protokolle, z. B. TC1797-Prozessorarchitektur).
-
Wählen Sie explizit den Ziel-Speicherbaustein (FLASH oder EEPROM) vor der Initiierung des Prozesses aus.
| FLASH | EEPROM |
|
|
|
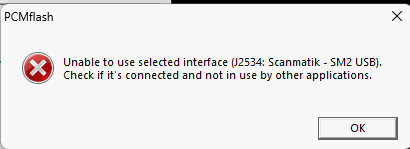
4.2 Bekannte Schnittstellen-Anomalien
Während der Initialisierung (Identifikation, Auslesen oder Schreiben) kann es temporär zu Verbindungsfehlern mit dem J2534-Interface kommen („SM2 nicht gefunden“). Diese Systemmeldung beruht auf Timing-Latenzen des Treibers und kann in der Regel durch ein erneutes Triggern des Befehls übergangen werden.
4.3 Schritt-für-Schritt-Anleitung: Auslesen (Read) / Schreiben (Write)
-
Profilierung: Wählen Sie das gewünschte Steuergerät und das Speichersegment aus.
-
Sicherung: Klicken Sie auf READ, um den Ausleseprozess zu starten. (Beim Wiederbeschreiben wählen Sie stattdessen die modifizierte Quelldatei und klicken auf WRITE).
-
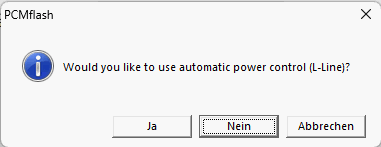
Protokoll-Abfrage: Das System fordert eine Bestätigung zur Nutzung der K-Line an. Da die Kommunikation rein über den CAN-Bus erfolgt, wählen Sie hier „Nein“ (bzw. deaktivieren Sie diese Option im Schreibmenü).
| Bei READ | Bei Write |
|
|
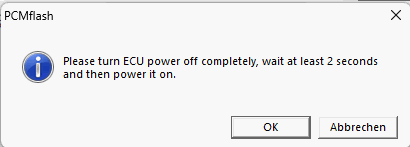
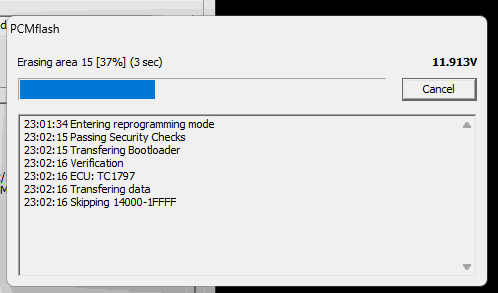
4. Power-Cycle (Kritischer Schritt): Die Software fordert Sie via Pop-up auf, die Spannungsversorgung manuell herzustellen („Manual Power Message“). Erst jetzt verbinden Sie das 12V-Netzteil mit dem SM2-Schnittstellenmodul und bestätigen das Pop-up mit OK.
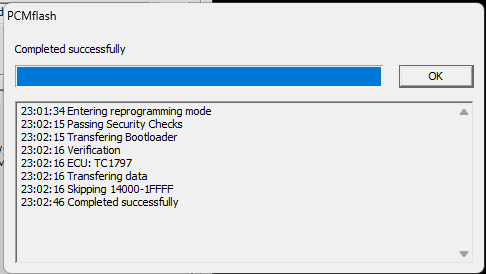
5. Prozessüberwachung: Der Datentransfer startet automatisch. Überwachen Sie den Fortschrittsbalken, bis das System die Operation mit dem Status „Action completed successfully“ quittiert.
6. Datenmanagement: Benennen und archivieren Sie die exportierten Binärdateien unverzüglich und eindeutig, um Verwechslungen beim späteren Klonen zu vermeiden.
Das war auch schon die ganze Hexerei. Wie immer in der IT - gewusst wie ;)
Hier schreiben …